| 充电与启动
|充电
- 交流发电机AC纹波(无ECM控制)
- 交流发电机AC纹波(有ECM控制)
- 交流发电机电压和电流(12V系统)
- 交流发电机电压和电流(24V系统)
- 福特智能交流发电机
- 寄生/漏电电流
| 启动
- 相对压缩(汽油机)
- 相对压缩(柴油机)
| 传感器
|油门踏板
- 加速踏板位置传感器-模拟/模拟
- 加速踏板位置传感器-模拟/数字
| 空气流量计
- 空气流量计(叶片式)
- 空气流量计(热线式-汽油机)
- 空气流量计(数字式)
- 空气流量计(热线式-涡轮增压柴油机)
| 凸轮轴
- 凸轮轴传感器(交流励磁式)
- 凸轮轴传感器(霍尔效应式)
- 凸轮轴传感器(感应式)
| 曲轴
- 感应式曲轴位置传感器-起动中 (浮地)
- 感应式曲轴位置传感器-运行中 (浮地)
- 感应式曲轴位置传感器-起动中 (非浮地)
- 感应式曲轴位置传感器-运行中 (非浮地)
- 霍尔效应曲轴传感器-运行中
| 冷却液温度计
- 发动机冷却液温度传感器(5V参考电压)
| 分电器拾取
- 分电器拾取器(霍尔效应)
- 分电器拾取器(感应式)
| 燃油压力
- 燃油压力传感器-共轨柴油
| 无钥匙进入
- 无钥匙进入
| 爆震
- 爆震传感器
| 进气歧管压力传感器
- 模拟式-汽油
- 模拟式-增压柴油
- 数字式-汽油
- 数字式-汽油
| 氧气传感器
- 宽带,博世LSU 4.2
- 二氧化钛
- 氧化锆
- 加热器(氧化锆)和信号电路
- 触媒催化器前后氧气传感器(氧化锆)
| 倒车雷达
- 倒车雷达
| 车速传感器
- 车速传感器(霍尔效应)
| 节气门位置
- 节气门位置电位计
- 节气门位置开关
| ABS
- 霍尔效应式
- 感应式
- 磁阻式
| 执行器
|碳罐电磁阀
- 碳罐电磁阀(电压)
| 废气再循环电磁阀
- 废气再循环电磁阀(电压)
| 燃油泵
- 燃油泵(电流)
| 柴油机预热塞
- 柴油机预热塞(电流)
- 柴油机预热塞(电流与电压)
| 怠速控制阀(IAC)
- 怠速控制阀(电磁式)
- 怠速控制阀(旋转螺线管)
- 步进马达
| 喷油嘴(汽油机)
- 汽油直喷-(喷嘴电流)
- 汽油直喷-(喷嘴电压)
- 汽油直喷-(喷嘴电压和电流)
- 多点喷射-(喷油嘴电流)
- 多点喷射-(喷油嘴电压)
- 多点喷射-(喷油嘴电压 vs 电流)
- 单点喷射-(喷油嘴电流)
- 单点喷射-(喷油嘴电压)
| 喷油嘴(柴油机)
- 共轨柴油(博世) – 压电式喷油嘴电流
- 共轨柴油(博世) – 电磁阀式喷油嘴电流
- 共轨柴油(德尔福) – 电磁阀式喷油嘴电流
- 压电式喷油嘴 – VAG PD 单体泵 (电流)
- 压电式喷油嘴 – VAG PD 单体泵 (电压、电流和接地)
| 压力调节阀
- 共轨柴油(博世) – 压力调节阀
| 流量控制阀
- 共轨柴油(博世) – 流量控制阀
| 油门伺服马达
- 油门伺服马达
| 可变速冷却风扇
- 可变速冷却风扇
| 可变气门正时
- 可变凸轮轴正时-单控电磁阀电压
- VVT执行器-可变气门正时
| 点火系统
|独立点火系统(COP)
- 两线-COP
- 初级电压和电流(2 线)
- 初级电压和电流(3 线)
- 初级电压 vs 次级电压
- 初级电压 vs 次级电压和电流
- 使用COP探头测次级电压 ( mV 量程)
- 触发和反馈(4 线)
- 次级点火电压(使用点火延长线)和放大器数字开关信号
| 多COP单元
- 初级绕组驱动信号(双驱动)
- 初级绕组驱动信号(双驱动) &电流
- 初级绕组驱动电压信号 vs 电流 vs 次级电压
- 初级绕组驱动电压信号 vs 次级电压
- 次级点火电压(四个气缸)
- 正极点火– 次级电压
- 负极点火– 次级电压
| 分电器
- 初级电流
- 初级电压(使用 10:1 衰减器)
- 初级电压和电流
- 初级点火 vs 次级点火
- 中央高压线次级电压 vs 分缸高压线次级电压
- 中央高压线次级电压
- 分缸高压线次级电压
| 无分电器系统(DIS)/无效火花
- 初级电流
- 初级电压 (使用 10:1 衰减器)
- 初级绕组驱动信号(双驱动) & 电流
- 初级电压 vs 初级电流
- 初级电压 vs 次级电压
- 负极点火 – 次级电压
- 正极点火– 次级电压
- 次级电压 vs 初级电压 vs 初级电流
- 放大器接地
| 通信网络
| CAN总线
- CAN 总线物理层
- CAN 总线串行译码
| FlexRay 总线
- FlexRay总线物理层
| K-line 总线
- K-Line
| LIN 总线
- LIN总线 – 发动机熄火时测试
| 系统测试
| HVAC 系统效率
- HVAC 效率
| 线缆摇摆测试
- 线缆摇摆测试
| 凸轮轴位置与曲轴位置
- 曲轴位置传感器 vs 凸轮轴位置传感器
| 点火初级电压与曲轴位置
- 分电器点火系统初级电压 vs 曲轴位置传感器
| 点火初级电压与喷油嘴电流
- 分电器点火系统初级电压 vs 多点喷油嘴电流
| 压力传感器
| WPS500压力传感器
- 共轨柴油喷嘴回油压力测试
- 曲轴箱压力测试 (起动中)
- 曲轴箱压力测试 (运行中)
- 排气脉冲测试 (起动中)
- 排气脉冲测试 (运行中)
- 燃油负压 – 柴油机
- 进气歧管压力 – 起动中(汽油机)
- 进气歧管压力 – 怠速运行中(汽油机)
- 进气歧管压力 – 节气门迅速全开(汽油机)
- 气缸内压力测试 (起动中)
- 气缸内压力测试 (运行中)
- 气缸内压力测试 (节气门迅速全开)
- 涡轮增压器性能测试 (汽油机)
CAN总线串行译码
这个测试的目的是通过对CAN物理层串行译码,评估车辆数据总线(CAN Bus)的报文和数据帧。
波形采集方法
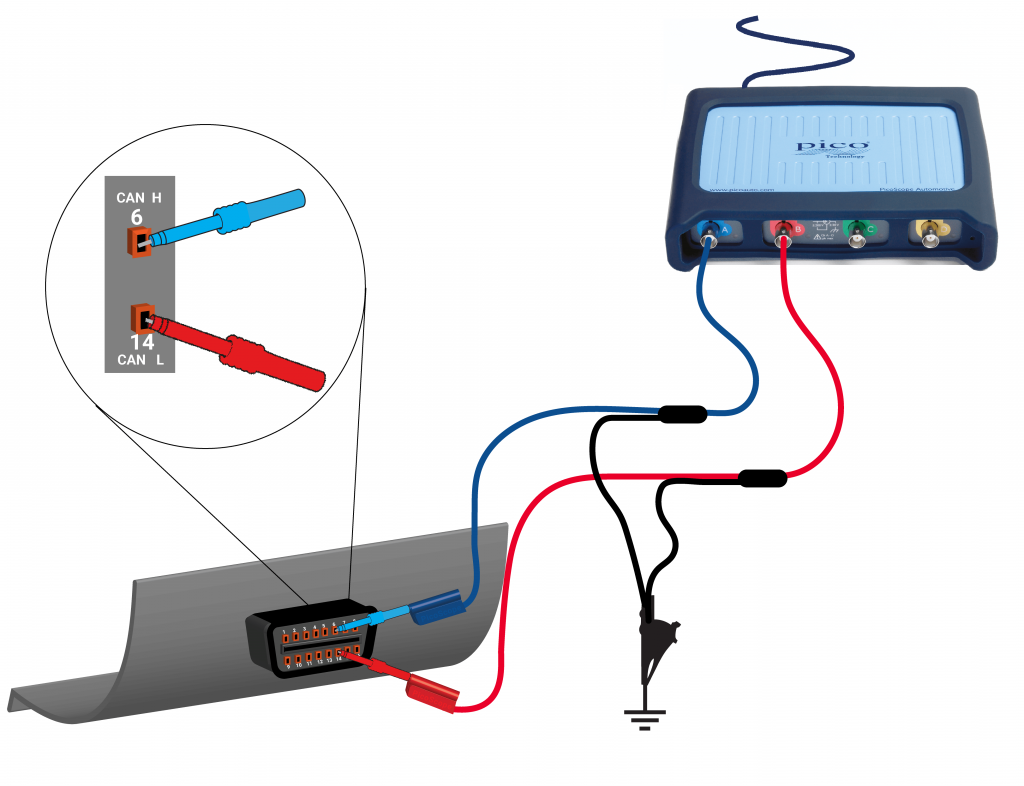
●使用汽车技术手册,找到车辆DLC(诊断连接器)的16针脚插头。在CAN网络易连接的地方找到CAN-H和CAN-L的针脚。(通常在网络上的每个ECU的多路接头上。)
●连接一条BNC测试线到示波器A通道,连接一个后背刺针到测试线彩色接头(正极)上。再用刺针背刺车辆DLC的针脚6,黑色接头连接到车辆的蓄电池负极或底盘良好的接地上搭铁。
●连接一条BNC测试线到示波器B通道,连接一个后背刺针到测试线彩色接头(正极)上。再用刺针背刺车辆DLC的针脚14,黑色接头连接到车辆的蓄电池负极或底盘良好的接地上搭铁。
●如果您有CAN测试盒,可以将CAN测试盒的16针脚插头连接到车辆的DLC(诊断连接器)上进行测试。CAN测试盒上的LED灯会开始亮起来,告知你通讯已建立,并且告诉你连接的DLC里哪个针脚在活动。
●最小化此帮助页面,您会看到PicoScope软件界面加载了一个示例波形,而且预设好了软件以便您采集波形。
●点击”开始”,开始观察实时数据。
●打开点火开关。
●采集到波形后,“停止“示波器运行。
●关闭点火开关。
●使用波形缓冲区、放大以及测量等工具来观察和分析波形。
●观察和分析串行译码表的数据结果。
示例波形
波形注意点
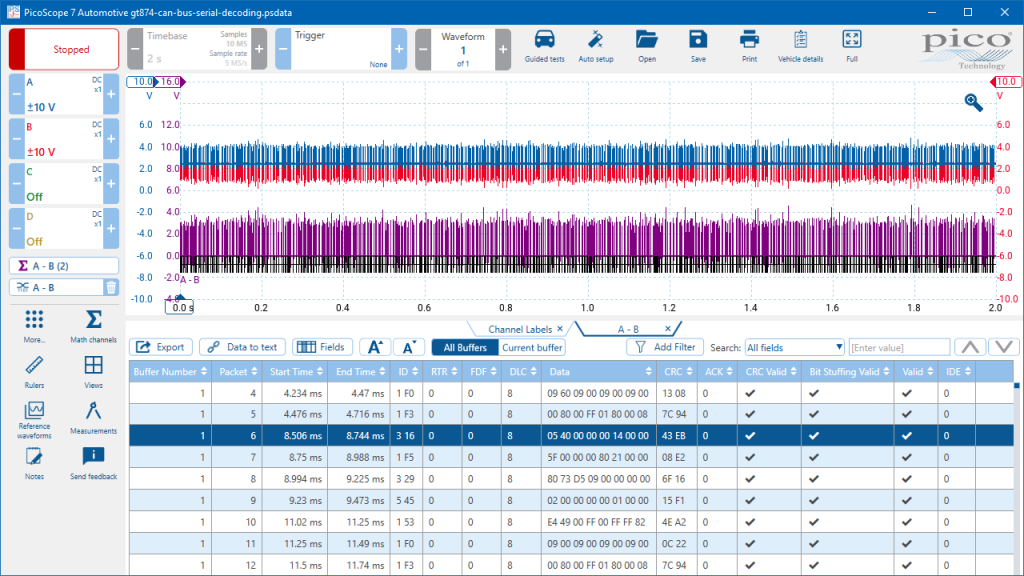
这个波形有以下特征:
●我们可以清晰地看到CAN使用的是差分信号,CAN-L和CAN-H两个信号互为镜像。
●CAN-L波形在2.5V和1.5V切换变化,CAN-H波形在2.5V和3.5V切换变化。
●低电平和高电平的切换动作是非常干净的,它们的边缘干净且互相一致,这表示该CAN总线的节点和CAN控制单元之间通讯正常。
●数学通道A-B是CAN-H和CAN-L的差分电压值,表明总线的逻辑状态。
●译码结果显示在表格当中,包括每条报文的ID、Data 等等。
●如果是正确信息,数据会标记为黑色;如果是错误或无效信息,会突出显示为红色。
更多信息
CAN bus是一个串行通讯系统,被用于很多车辆上连接各个系统和传感器,代替传统的多线线缆束。
CAN是Controller Area Network(控制器局域网络)的缩写。它在轿车和商用车上越来越普遍。它的优势包括:明显地减少重量、可靠、易于制造,并为车载诊断提供选项。它的劣势包括:增加了成本,且服务维修车辆时需要一些专业知识。
CAN总线的心脏是CAN控制器。它通过CANH和CANL线缆连接到CAN网络上的所有部件(节点)上。信号是差分的:每条CAN线参考另一条CAN线,而不是参考车辆接地。在电子噪音干扰环境中如车辆,CAN总线具有很好的噪音抑制。
每个网络节点具有唯一的标识符。因为总线上的ECU是并联的,所有节点一直看得到所有的数据。节点只有检测到它自己的标识符时才作出回应。例如,当ABS ECU发送指令来激活ABS单元,ABS单元相应地作出回应,但网络的其余部分忽视这个指令。每个节点都可以从网络上被断开,但不会影响其它的节点。
因为很多不同的汽车部件可能共享同样的总线硬件,将可用的CAN总线带宽优先分配给最安全关键的系统是很重要的。节点通常会被分配不同的优先级。例如,发动机控制、刹车和气囊在安全角度上来看是最重要的,用于激活这些系统的命令优先级被赋予最高(1),它们会在较为没那么关键的系统之前工作。音频和导航设备通常是中级(2)优先级,而简单的灯光激活被赋予最低优先级(3)。一个被称为仲裁的过程决定所有信息的优先级。实际上,对用户来讲,所有动作都是即刻的。
大多数汽车CAN网络的工作速度是250kB/s或500 kB/s尽管系统的工作速度可达1MHz。最新的汽车上使用多达3个独立的CAN网络,通常它们的速度都不一样,它们被网关连接在一起。例如,发动机管理功可能用速度为500kB/s的高速总线,底盘系统用速度为250 kB/s 的CAN总线。管家功能如灯光、ICE.卫星导航和镜子用单独的低速的、单线的LIN总线。三个网络中的任一个网络上的数据,其它两个网络通过网关都可以看到,例如:变速器可从发动机管理系统获得数据,反之亦然。
CAN bus在现代汽车上逐渐普遍,并会更加普遍,因为技术成熟和成本下降。
通过检测CAN信号的原因是:OBD指示哪里有一个CAN故障,或者怀疑一个CAN节点(ECU)有故障检测它的CAN连接。应该查阅汽车制造厂手册,获知精确的波形参数。
记住:网络上很多数据都是极其关乎安全的,所以不要使用刺针刺破CAN线缆的绝缘层!
想了解更多关于CAN总线串行译码:
免责声明
此帮助主题如有更改,不另行通知。所包含的信息经过仔细检查并认为是正确的。此信息是我们研究和检测的一个例子,并不是固定的程序。对于不正确之处,Pico Technology不负任何责任。每个车辆都会不一样,且要求唯一的测试设置。